Thaiamp.com : Research&Development , Microcontroller, Design Circuit Electronic, Interface, Wireless link, ทั่วประเทศ...และจำหน่ายวงจรอิเล็กทรอนิกส์ต่างๆ
หุ่นยนต์รถวิ่งตามเส้น (Robot)
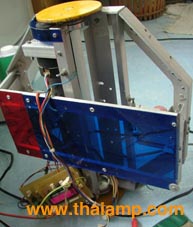
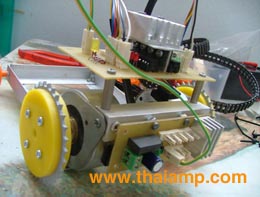
ตอนแรกที่คิดจะทำตัวรถวิ่งตามเส้นก็คิดถึงล้อรถถังก่อนเป็นแบบแรก เพราะตัวเองก็ไม่เคยลองทำแบบรถถังสักครั้งเลย พอซื้ออุปกรณ์มาก็เริ่มเล่นเลยครับ ส่วนวงจรที่ใช้ก็ได้ยืมวงจรของหุ่นยนต์ตามล่ามาครับ อีกเหตุผลหนึ่ง ก็คือ สนามที่จะทดลองให้รถวิ่งตามเส้นเดินนั้น จะมีอยู่บางช่วงที่เป็นเนิน ถ้าจะใช้เป็นล้อแบบหุ่นยนต์ตามล่าก็คงขึ้นเนินไม่ได้ครับ เพราะล้อเป็นโลหะ เมื่อทำการประกอบตามแบบที่คิดไว้แล้วก็ได้หุ่นออกมาตามภาพ โดยที่ล้อหลังจะเป็นตัวที่ต่ออยู่กับมอเตอร์แบบสเต็ป มอเตอร์ที่นำมาใช้ก็เป็นมอเตอร์เก่าที่หากได้จากแถวๆ บ้านหม้อครับซื้อเก็บไว้นานมากแล้ว ตอนนั้นที่ซื้อตัวหนึ่งก็ไม่กี่บาท ประมาณตัวละสิบบาทได้ แต่ถ้าหากไปหาซื้อตอนนี้นะครับคงแพงมากๆ เพราะร้านขายขึ้นราคาจากเดิมมากครับ อะไหล่ที่เราเคยซื้อได้ตัวละไม่กี่บาทก็เหมือนกันราคาค่อนข้างสูงมากครับ
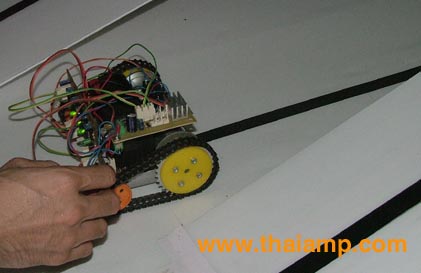
จากที่ได้ทำการทดลองหลายๆ แบบก็พอได้เป็นข้อสรุปสำหรับการทำหุ่นยนต์รถวิ่งตามเส้นไว้สำหรับทดลองเขียนโปรแกรมควบคุมอย่างคร่าวๆ แต่ก็ไม่ได้หมายความว่าท่านที่อ่านจะต้องทำแบบนี้เสมอนะครับ เป็นเพียงการทดลองที่ผมเองได้ทดลองเล่นเองแล้วนำผลที่ได้มาเล่าสู่กันฟังครับ ท่านใดที่ทดลองอะไรเล่นแล้วได้ผลอย่างไรก็ลองเมล์มาคุยกันได้นะครับ ส่งท้าย ผมคิดว่าการที่จะทดลองหัดเขียนโปรแกรมไมโครคอนโทรเลอร์เพื่อไปใช้งานหรือหัดใช้งานควบคุมงานต่างๆ นั้น หากเรามีหุ่นยนต์ตัวเล็กๆ ไว้สักตัวเพื่อให้หุ่นทำตามเงื่อนไขต่างๆ ที่เราวางไว้ จะสามารถทำให้เราเรียนรู้การทำงานของไมโครคอนโทรเลอร์ตระกูลต่างๆ ได้เป็นอย่างดี อีกทั้งยังทำให้เราได้รู้ธรรมชาติของอุปกรณ์ที่เรานำมาต่อใช้งานว่าอุปกรณ์แต่ละตัวมีข้อดีข้อเสีย และเหมาะสมกับงานแบบใด ส่วนของการทำงานของวงจร โปรแกรม หลักการทำงาน และตัวอย่างโจทย์จะนำเสนอในครั้งต่อไปนะครับ ลองหาหุ่นยนต์รถวิ่งตามเส้นตัวเล็กๆ ไว้สักคันผมว่าก็ดีนะครับ สำหรับผู้เริ่มต้นเล่นไมโครคอนโทรเลอร์
สนใจ หุ่นยนต์รถวิ่งตามเส้น (Robot)